
应用机器人
机器人是工程的试金石。Yike Teck 将电子、机械与智能控制带到最难的部分:极限精度、合适材料和非传统方案。
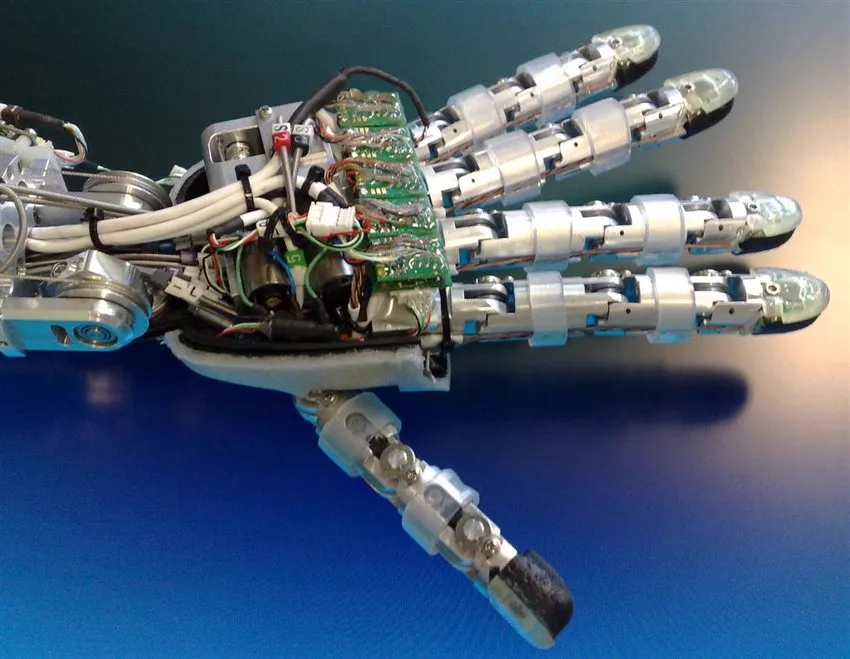
机器人手是标志性挑战:大量关节、微动作,对脆弱或沉重物体施压而不失去灵敏度。力量与精细的微妙平衡——正是我们想解决的。
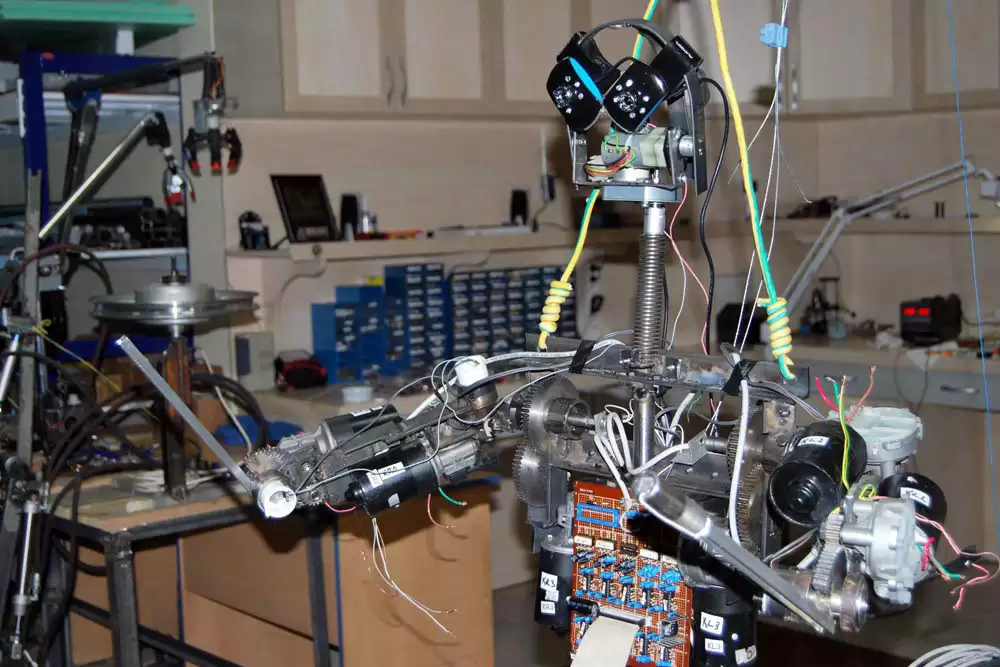
关节与执行器(手、膝、踝、髋)必须既强又轻、既紧凑又有力、既快速又稳定。背后是精密机械、电/液执行器和密集传感,支撑实时控制。
机器人手必须能毫米级控制地抓取、旋转、夹紧和释放:力量与精细同在。
机器人手与灵巧度
要复现人类的灵巧,需要协同多自由度、压力与感知反馈。我们设计的手可在不失灵敏的情况下处理脆弱与沉重物体。
多关节控制
- • 手指与拇指的精细抓取和旋转
- • 微动作与自适应握持
- • 触觉反馈以保持灵敏
力量 + 精细
- • 对脆弱或沉重物体施压可控
- • 材料与运动学防止打滑
- • 通过坚固方案减少磨损
运行可靠性
- • 分布式传感器支持实时控制
- • 机械冗余与安全软件
- • 疲劳与循环测试
关键关节与执行器
膝、踝、髋是稳定节点:需承重、吸收冲击并保持灵敏。我们设计紧凑、轻量且高扭矩的执行器。
精密机械
- • 低回差减速器与连杆
- • 轻质高强材料
- • 紧凑封装实现功率密度
电/液执行
- • 依据扭矩/重量选择电机与执行器
- • 高力密度场景使用液压
- • 热管理与散热设计
集成传感
- • 每个关节的力、扭矩与位置
- • 持续监测助力预测性维护
- • 为快速控制循环提供干净信号
运动控制
平衡、行走、适应不平地面和突发推力,需要高级控制模型。我们实时预判、校正和补偿。
动态平衡
- • 在多变场景下控制重心
- • 行走与转向中的稳定性
传感融合
- • IMU、力/扭矩与视觉预判扰动
- • 识别推挤或障碍并快速反应
AI 闭环
- • 实时预测与校正
- • 利用现场数据持续学习优化控制
Yike Teck 的方法
将机械、电子与 AI 融合,打造务实、可扩展且关注成本的方案。我们攻克他人避开的难题,化复杂为可靠。
原型与量产
- • 从概念到原型,迭代测试
- • 文档与量产计划
可靠与安全
- • 冗余控制与安全回退
- • 操作清单与计划维护
成本与规模
- • 材料/器件选择兼顾经济性
- • 量产路线与部署后支持
为什么
无论是更灵敏的手、更稳定的关节,还是更智能的控制,目标只有一个:把机器人的难题变成新产品和新交互方式的机会。